JY
Home
Resume
Portfolio
Contact
About
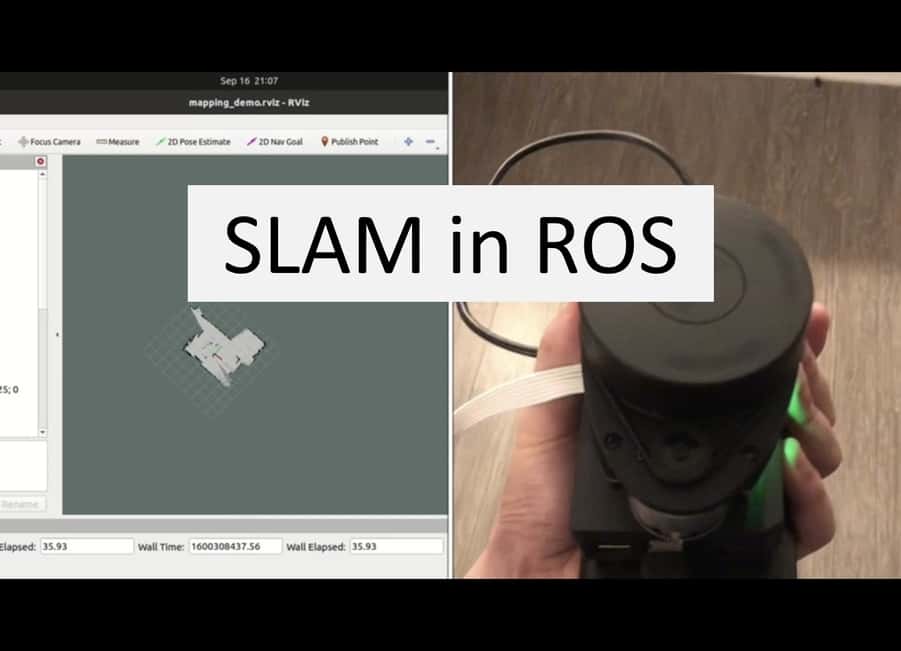
Auto Search A Target and SLAM with A Custom Robot in ROS (simulation)
(More details will be added soon)
Links:
Other Projects.
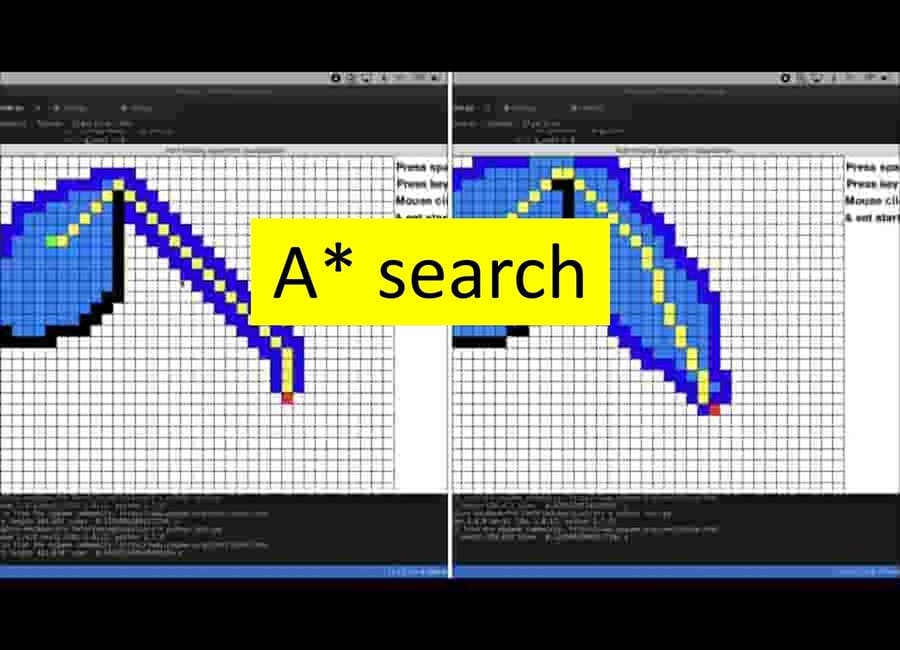
A* search algorithm comparison on Manhattan and Euclidean distance
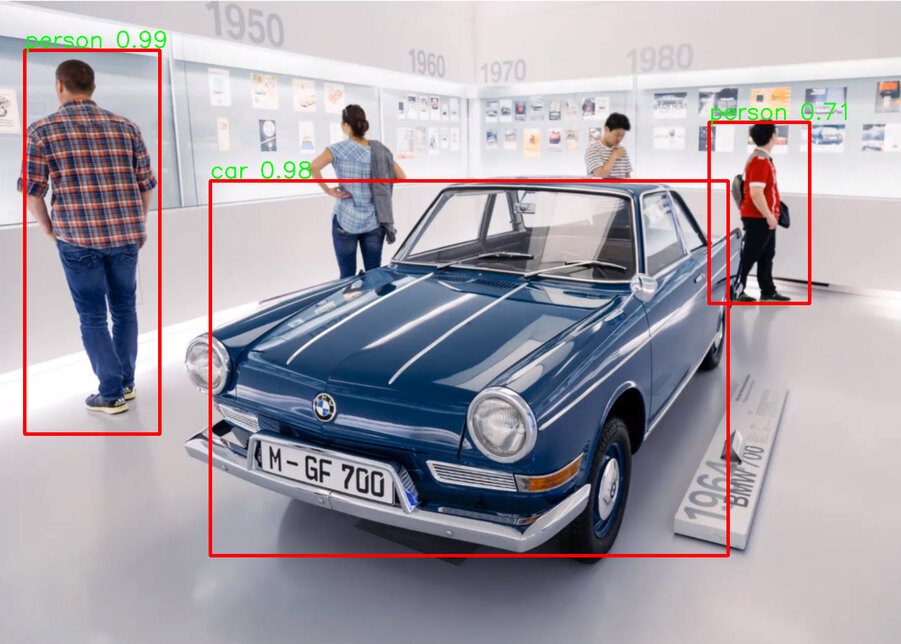
Control Custom Robot in ROS Gazebo with Object Detection in Tensorflow
2D Mapping using Hector SLAM and RPLidar with Raspberry Pi 4
Computer Vision: Uses machine learning CNN DNN to train model and realize object detection
© 2020 Jinbing Ying.