Created a simulated 2-wheel differential drive robot. Defined inertia matrix, sensor attributes and TF relationships
between each part using xacro. Imported the robot to an environment in Gazebo. The angular and linear velocity of the
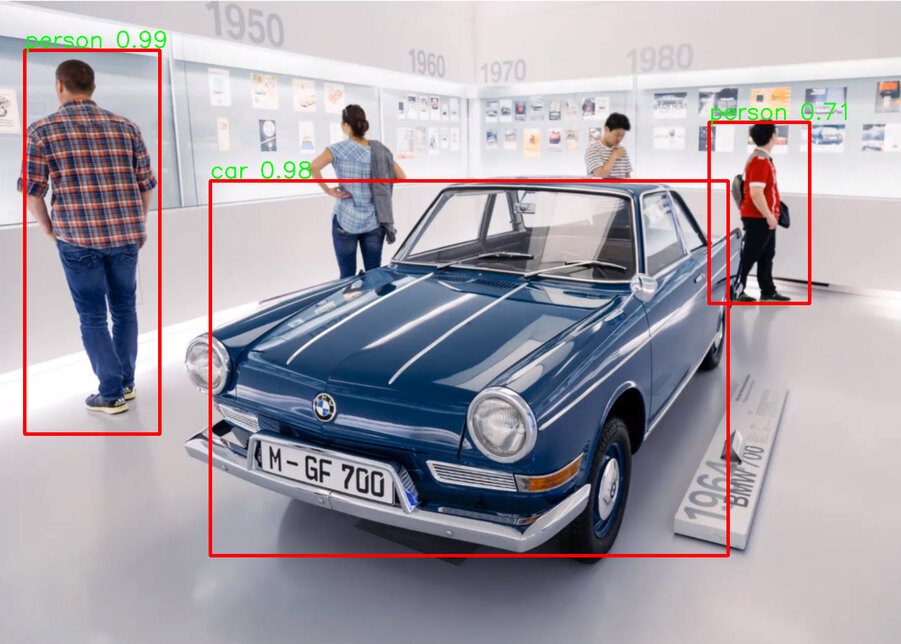
robot is then controlled by a cup’s position detected on the camera in a real-world environment using object detection
in TensorFlow.
(More details will be added soon)
Links: