JY
Home
Resume
Portfolio
Contact
About
My Skills and Projects.
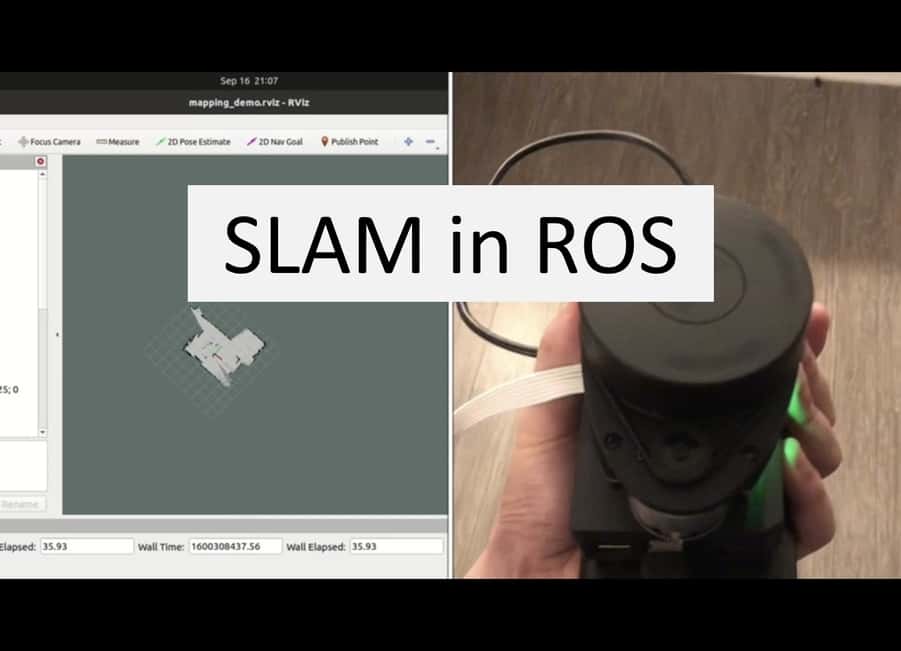
Auto Search A Target and SLAM with A Custom Robot in ROS (simulation)
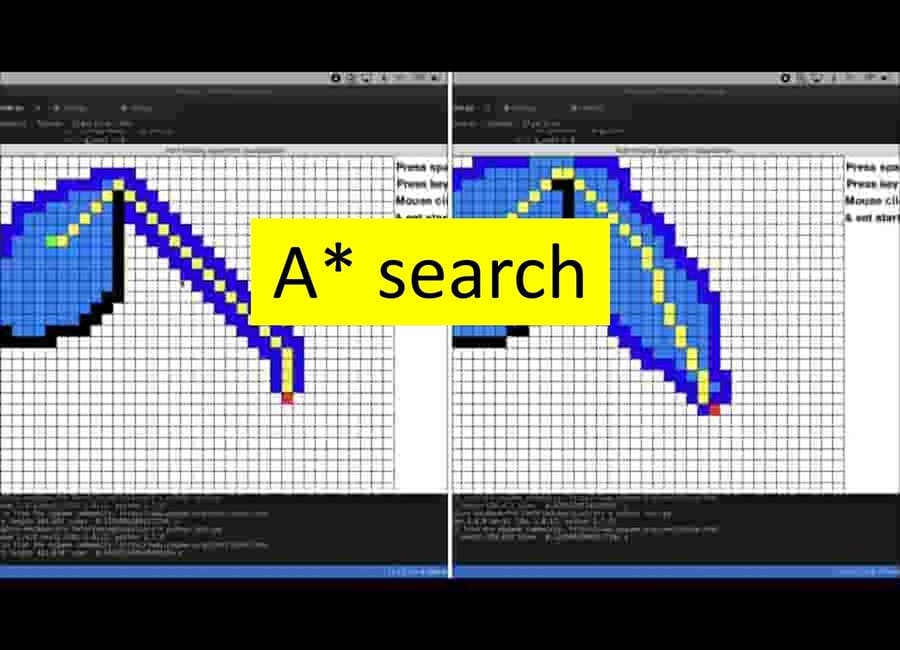
A* search algorithm comparison on Manhattan and Euclidean distance
Control Custom Robot in ROS Gazebo with Object Detection in Tensorflow
2D Mapping using Hector SLAM and RPLidar with Raspberry Pi 4
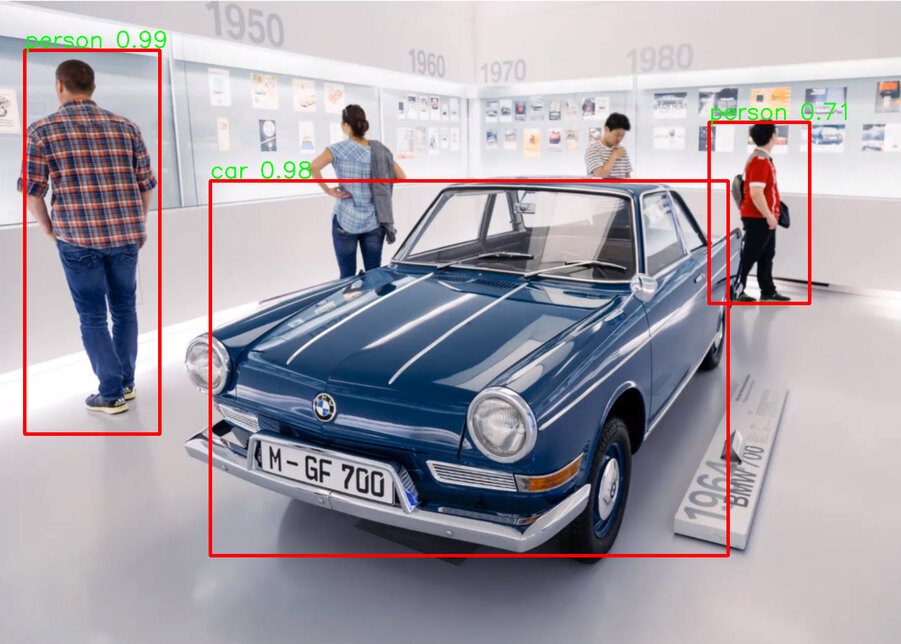
Computer Vision, uses machine learning CNN DNN to train model and realize object detection
Worry Stone Android App: build a mobile app and a server to save texture data from users
Path Following Robot: this robot detects and follows path automatically
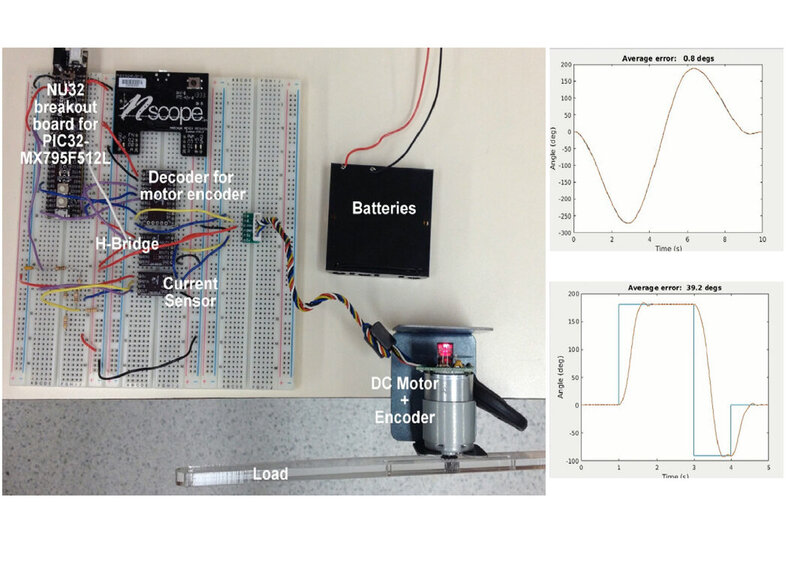
Motor Control: utilize MCU and closed PID feedback loop to control motor direction, speed, trajectory etc.