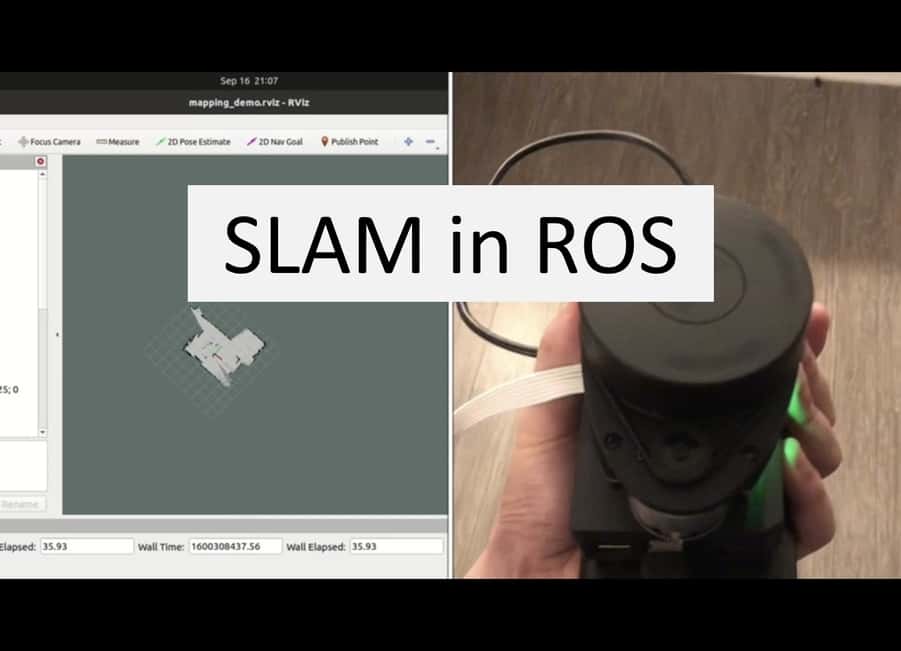
Built a wireless SLAM machine using a RPlidar, Raspberry Pi 4(RPI) and power battery bank. Modified Hector slam
navigation file to adapt to mapping with only RPlidar. Build a wireless server and client communication between RPI and
workstation. ROS master running on RPI sends lidar scan data to workstation ROS client. The received data is interpreted
and processed. 2D map data is visualized in RVIZ on workstation in real time.
(More details will be added soon)
Links:
github page
Hector slam Wiki