Motor Control with MCU and Matlab
In this motor control project, I developed a program in C on PIC32 to adjust the motor speed with PWM output and
established Current/Torque motion control loops with PID control. Also I constucted a PIC32 embedded system with motor
decoder, current sensor , H bridge to control the DC motor in running direction, angle and trajectory. What’s more,
serial communication was realized between Matlab and PIC32 to plot the results.
The client, written in MATLAB, communicates with the PIC32 on the NU32 development board via serial port, sending
control gains and desired setpoints and motion trajectories, and tracking results are sent back to the MATLAB client for
plotting. The PIC32 manages a nested control loop system consisting of a outer PID motion control loop and a high-speed
inner PI current (torque) control loop
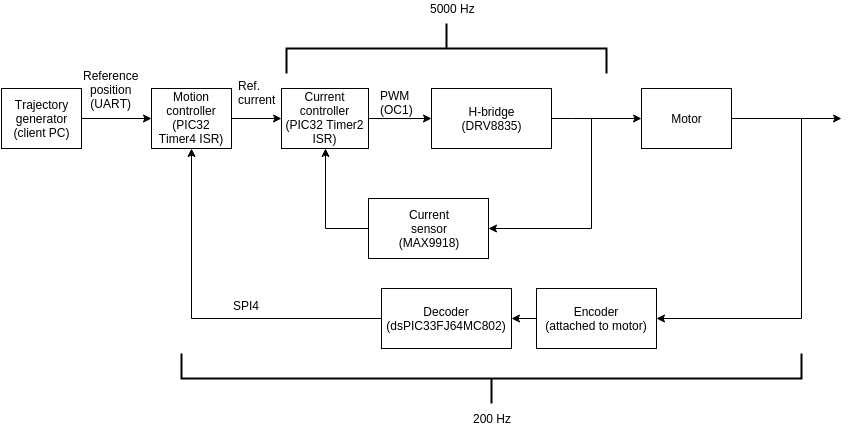
Figure 1: PID motion control loop and PI current control loop demonstration
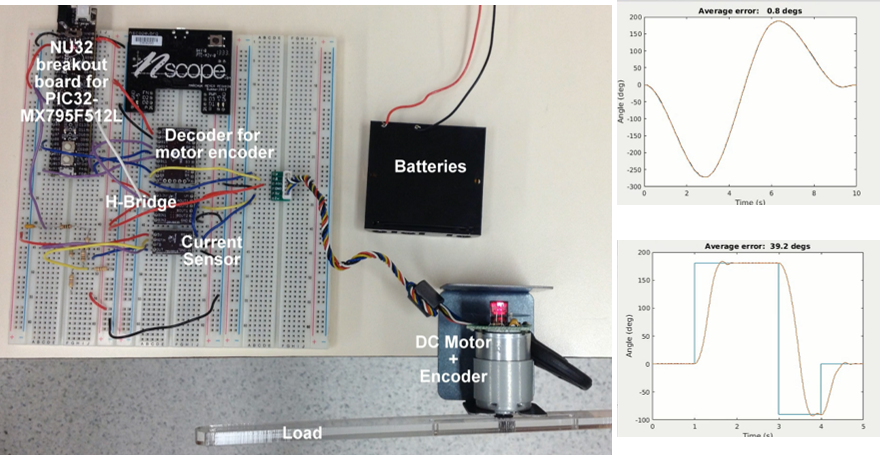
Figure 2: Main electronic parts and plotted results of step and cubic trajectories