Android Path Follower Mobile Robot
In this project I designed, fabricated, and programmed a mobile robot made of laser cutting and 3D printed parts,
which
follows the path on a map automatically. A basic connection circuit integrated with PIC32 and other electronics was
designed in Eagle and fabricated to implement the motot control task. A Moto G1 phone works in parell with the circuit
to detect the running path. For the phone side, an app was created using Android Studio, with a slider and live camera
preview to adjust RGB thresholds on-the-go for detecting colored line. I also programmed a PIC32 MCU to receive the
line
position via USB CDC and perform PD control of PWM output on wheel motors.
By the method of pixel filtering on a detecting band selected from real time camera preview, the red path color is
picked out. The deviation of the detected point from the center of mass is calculated and then used to determine the
speed and direction of the Robot.
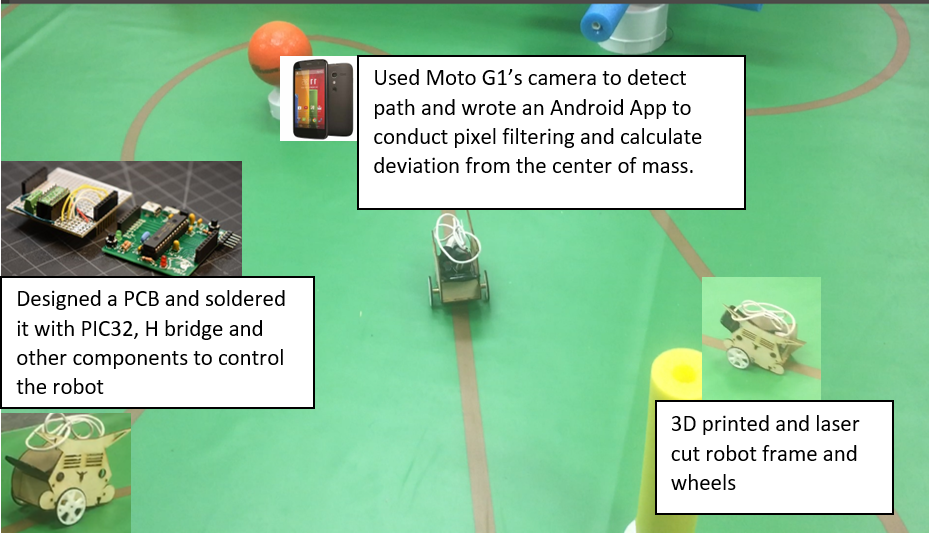
Figure 1: Demonstration of Android Path Follower Mobile Robot Project